ТЕХНИЧЕСКОЕ ОПИСАНИЕ
И ИНСТРУКЦИЯ ПО ЭКСПЛУАТАЦИИ
СИСТЕМЫ КОРРЕКЦИИ
НАВЕДЕНЯ И СЛЕЖЕНИЯ
БТА АН СССР
(ТО и ИЭ СКН БТА)
1987
Главное управление
геодезии и картографии
при Совете Министров
СССР
ЦЕНТРАЛЬНЫЙ ОРДЕНА
"ЗНАК ПОЧЁТА" НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ГЕОДЕЗИИ, АЭРОСЪЕМКИ
И КАРТОГРАФИИ
им. Ф.Н. КРАСОВСКОГО
(ЦНИИГАиК)
СОГЛАСОВАНО : УТВЕРЖДАЮ:
Зам.
директора САО АН СССР Зам.
директора ЦНИИГАиК
________ Л.И.Снежко _________ М.Г.
Герасименко
Зам.
гл. инженера САО 05.02.1987г.
________ Ю.М. Маметьев
09.02.1987
г.
ТЕХНИЧЕСКОЕ ОПИСАНИЕ
И ИНСТРУКЦИЯ ПО ЭКСПЛУАТАЦИИ
СИСТЕМЫ КОРРЕКЦИИ НАВЕДЕНИЯ И СЛЕЖЕНИЯ
БТА АН СССР
(ТО и ИЭ СКН БТА)
Зав.
отделом ГП
______
А. В. Токарев
Зав.
лаборатории ТСГР
______ А.С.Трофимов
05.02.1987г.
Разработчик
________
В.Я. Вайнберг
30.01.1987 г.
ОГЛАВЛЕНИЕ
Введение.......... …………………………………………………....... …….. 3
I. Техническое описание
I.1. Принцип работы ....................................................................... …….. 4
1.2. Формулы расчета
поправок, классификация параметров и структура СКН ......................................... …………………………………………… 5
1.3.
Аппаратура контроля положения I-й
(вертикальной) оси вращения монтировки ............................................................ …………………… 8
1.4.
Система оперативной регистрации положения главного зеркала в оправе
…………………………………………………………..……… 11
1.5. Система оперативной
регистрации температурных удлинений стоек монтировки телескопа
........................................................................... 16
1.6. Программное
обеспечение СКН ......................................... ……… 18
II. Инструкция по эксплуатации
2.1.
Порядок запуска СКН и состав работ по её обслуживанию ............ 23
2.2.
Определение параметров ξ, η, и изменение данных
поля III файла CONAR........................................................................ ……………….. 23
2.3.
Измерение поля ошибок и введение поправок в данные поля I файла CONAR................................................................... ………………….. 27
2.4.
Порядок изменения данных поля II файла CONAR……………….. 32
2.5 Проверка функционирования элементов
СКН ....................... …….. 33
ВВЕДЕНИЕ
Система коррекции наведения и слежения БТА
(далее CKH БТА
или просто СКН) предназначена для программного учета геометрических ошибок
телескопа и обеспечивает:
- наведение на объект любой из трёх визирных
осей со ср. кв. ошибкой не более 3'';
- стабилизацию положения изображения
наблюдаемого объекта в фокалькой плоскости объектива, в пределах 0,5" за
20 минут экспозиции (без учёта возможных колебаний телескопа от внешних
воздействий). СКН БТА разработана ЦНИИГАиК на основе выполненных им в I980-1986г.г. исследований геометрических
характеристик телескопа.
В реализации СКН, помимо ЦНИИГАиК, приняли
участие специалисты САО АН СССР, ЛОМО и ЛСМНУ.
Настоящее
техническое описание и инструкция по её эксплуатации (ТО и ИЭ) составлено
ЦНИИГАиК по заказу САО АН СССР в рамках договора между указанными
организациями. Разделы ТО и ИЭ, относящиеся к программному обеспечению СКН,
составлены при непосредственном участии сотрудника ЛСМНУ Жука С.И.,
В процессе эксплуатации СКН в ТО и ИЭ могут быть
внесены необходимые дополнения и изменения.
ТЕХНИЧЕСКОЕ ОПИСАНИЕ
1.1.
Принцип работы
Система коррекции наведения и слежения БТА
выполняет по заданному алгоритму программный учет геометрических ошибок
(параметров) телескопа. В качестве вычислителя используется процессор
управляющего вычислительного комплекса (УВК).
Исходными данными в уравнениях алгоритма являются координаты наблюдаемого
объекта в горизонтной системе (азимут А и зенитное расстояние Z) и
значения геометрических параметров, поступающих из памяти вычислителя и от
специальных датчиков геометрии (ДГ), установленных на телескопе.
Помимо учета геометрических параметров, CKН выполняет расчет поправок
к текущим координатам А и Z наблюдаемого объекта за суточную аберрацию и атмосферную
рефракцию. Значения температуры наружного воздуха и давления для расчёта
рефракции поступают от соответствующих метеодатчиков. (Описание и правила
эксплуатации метеодатчиков в данном ТО и ИЭ не приводятся)
Итоговым результатом CKН являются поправки ∆А и
∆Z к
расчётным значения азимута Ар и зенитного расстояния Zр наблюдаемого объекта.
Новые значения А = (Ар +∆А) и Z= (Zр + ∆Z) являются окончательными угловыми координатами
того объекта, наведение на который и последующее его сопровождение осуществляет
система “УВК – телескоп”.
I.2. Формулы расчета поправок, классификация параметров
и структура СКН.
Расчёт поправок, учитывающих геометрические
параметры телескопа (∆АГ ,∆ZГ) в случае наблюдения в первичном фокусе,
выполняются по формулам:
![]() (ϰ+G1)cosecZ,
(ϰ+G1)cosecZ,
![]() .
.
В случае наблюдения в фокусе Несмита I или 2,
формулы расчёта имеют вид:
![]()
![]()
Поправки за суточную аберрацию вычисляются по
формулам:
![]() ,
,
![]() .
.
Поправка за рефракцию вычисляется по формуле:
![]()
Результирующие поправки ∆A
и ∆Z равны суммам поправок за геометрию телескопа соответствующего
фокуса, суточную аберрацию и рефракцию.
Ниже приводится описание физического смысла и
размерность каждого параметра, входящего в приведенные выше формулы
расчёта. ![]() ,
, ![]() - ошибки положения
нулей А - и Z -
датчиков вал-код соответственно (в угл. сек.);
- ошибки положения
нулей А - и Z -
датчиков вал-код соответственно (в угл. сек.);
![]() ,
, ![]() – переменные от
угла поворота масштабные ошибки A – и Z - датчиков
вал-код соответственно (в угл. сек.);
– переменные от
угла поворота масштабные ошибки A – и Z - датчиков
вал-код соответственно (в угл. сек.);
![]() ,
, ![]() - амплитуды бокового и вертикального гнутия трубы
телескопа (в угл. сек.);
- амплитуды бокового и вертикального гнутия трубы
телескопа (в угл. сек.);
ψ -
неперпендикулярность I-й
(вертикальной) и 2-й (горизонтальной) осей вращения телескопа (в угл. сек.);
ϰ- неперпендикулярность
2-й оси вращения и визирной оси, задаваемой первичным фокусом телескопа (в угл.
сек);
α, β -
переменные от угла Z смещения
2-й оси вращения в горизонтальной и вертикальной плоскостях (в угл. сек.);
∆β- изменение
наклона 2-й оси вращения из-за неравных температурных удлинений стоек телескопа
(в угл. сек.);
G1, G2 - боковое и
вертикальное смещения визирной оси из-за нестабильности положения главного
зеркала в оправе (угл. сек.)
![]() ,
, ![]() - переменные от угла А
составляющие наклона I-й
оси вращения плоскости меридиана и плоскости первого вертикала соответственно
(в. угл. сек). Указанные составляющие рассчитываются по формулам:
- переменные от угла А
составляющие наклона I-й
оси вращения плоскости меридиана и плоскости первого вертикала соответственно
(в. угл. сек). Указанные составляющие рассчитываются по формулам:
![]() ,
,
![]() , где:
, где:
![]() ,
, ![]() - значения
составляющих наклона I-й
оси в плоскости меридиана и первого вертикала;
- значения
составляющих наклона I-й
оси в плоскости меридиана и первого вертикала;
![]() ,
, ![]() - переменные от А
составляющие колебаний I-й
оси в тех же плоскостях;
- переменные от А
составляющие колебаний I-й
оси в тех же плоскостях;
![]() ,
, ![]() - боковая и
вертикальная составляющие переменной от Z разности положения
визирных осей первичного фокуса и фокусов Несмита (в угл, сек.);
- боковая и
вертикальная составляющие переменной от Z разности положения
визирных осей первичного фокуса и фокусов Несмита (в угл, сек.);
В - давление воздуха (в
мм рт. ст.);
tº C - температура наружного
воздуха (в град.Цельсия).
Все геометрические параметры БТА подразделены на три группы: стабильные, периодически обновляемые и оперативные. Расчёт последней группы параметров ведётся по показаниям ДГ.
К стабильным относятся ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
Эти параметры хранятся в памяти вычислителя и являются неизменными на весь
период эксплуатации телескопа. Необходимость их ревизии может возникнуть только
в результате переделок осевых систем монтировки, конструкции трубы телескопа
или же замены на новые датчиков вал-код. Два последних параметра могут изменить
свои значения также после очередной юстировки оптического тракта фокусов Несмита
(гиперболы и диагонального зеркала).
.
Эти параметры хранятся в памяти вычислителя и являются неизменными на весь
период эксплуатации телескопа. Необходимость их ревизии может возникнуть только
в результате переделок осевых систем монтировки, конструкции трубы телескопа
или же замены на новые датчиков вал-код. Два последних параметра могут изменить
свои значения также после очередной юстировки оптического тракта фокусов Несмита
(гиперболы и диагонального зеркала).
К этой же труппе относятся и нулевые показания d° датчиков геометрии и
коэффициенты k пересчёта их показаний в линейные
перемещения. Замена этих параметров осуществляется только в случае замены самих
датчиков.
К периодически обновляемым относятся ![]() ,
, ![]() ,
,
![]() ,
ϰ,
,
ϰ, ![]() ,
,
![]() .
.
Значения указанных параметров хранятся в памяти
вычислителя и обновляются после очередной аттестации телескопа (определение
среднего положения I-й оси вращения и
измерение поля ошибок наведений).
К оперативным
относятся G1, G2
и ![]() . Эти параметры рассчитываются по формулам:
. Эти параметры рассчитываются по формулам:
![]() ,
,
![]() ,
,
![]()
Здесь Di = ![]() , где d - показание ДГ в вольтах,
k- масштабный коэффициент
пересчёта показаний в значение D.
(Начальные значения
, где d - показание ДГ в вольтах,
k- масштабный коэффициент
пересчёта показаний в значение D.
(Начальные значения ![]() и
и ![]() относятся к группе стабильных параметров).
относятся к группе стабильных параметров).
Датчики геометрии опрашиваются программно с
периодичностью 1 раз в 10 секунд. С той же периодичностью
выполняется расчет поправок ∆А и ∆Z. Структурная схема CKII показана на рис.1.1.
1.3. Аппаратура контроля положения I-й (вертикальной)
оси вращения монтировки.
Описываемая аппаратура предназначена для
периодических измерений среднего наклона 1-й оси вращения по двум составляющим:
![]() - в плоскости меридиана и
- в плоскости меридиана и ![]() - в плоскости первого
вертикала. Измерительным устройством является электронный уровень ЭУ, датчики
которого скреплены с валом I-й
оси вращения.
- в плоскости первого
вертикала. Измерительным устройством является электронный уровень ЭУ, датчики
которого скреплены с валом I-й
оси вращения.
Электронный уровень состоит из двух датчиков наклона
№3 и №4, блока регистрации и управления и блока питания. Общий вид ЭУ показан
на фотографии рис.1.2.
Датчики наклона закреплены на специальном
кронштейне, приваренном к внутренней стенке полой I-й оси вращения, немного выше горизонта установки
резервного азимутального датчика вал-код "ОПТОСИН". Датчик №3
ориентирован так, что позволяет измерять наклоны I-й оси в плоскости вращения трубы телескопа, датчик №4 - в
перпендикулярной плоскости.
Блок регистрации и управления находится слева от
датчиков, блок питания - на противоположной стенке помещения.
Проход к ЭУ из подкуполъного помещения через люк
в центре платформы монтировки телескопа.
По принципу действия ЭУ
относится к маятниковым приборам с индуктивными датчиками положения маятника.
Электронная схема измеряет амплитуду сигнала, пропорционального разности
индуктивностей катушек датчиков, и индицирует эту амплитуду показанием
стрелочного прибора (микроамперметра).
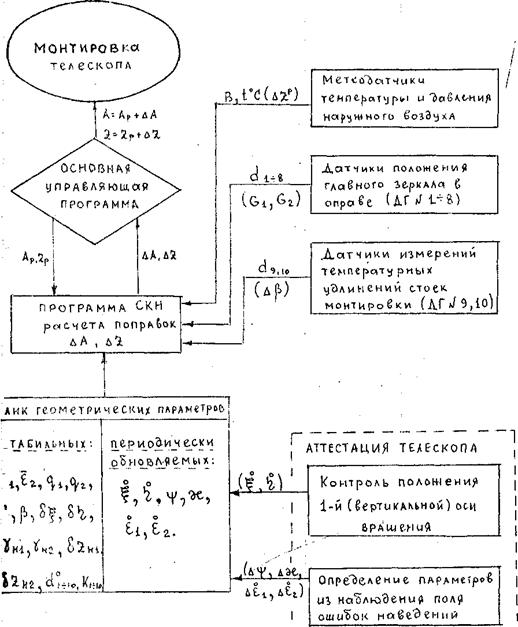
Рис I.I.
Структурная схема СКН БТА.
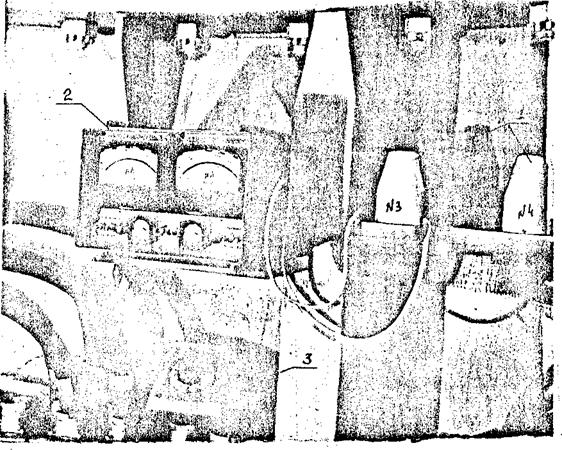
Рис.I.2. Электронный уровень.
I - датчики наклона; 2 -
блок регистрации и управления; 3 - телефон для связи с ЦПУ.
Цена наименьшего деления стрелочного указателя
наклона равна 0,48". Схематический чертёж датчика наклона ЭУ показан па
рис. 1.3. На рис.1.4. приведен вид передней панели блока регистрации и
управления. Все блоки ЭУ соединены кабельными связями.
Аппаратура контроля положения I-й оси, при условиях сохранения её неизменного
положения на телескопе и отсутствии грубых механических воздействий, в
техническом обслуживании не нуждается.
1.4. Система оперативной
регистрации положения главного
зеркала в оправе.
Система оперативной регистрации положения
главного зеркала в оправе реализована датчиками геометрии (ДГ) №№ 1…8,
показания d которых используются для
расчёта параметров G1 и G2 (см.п.1.2).
В состав системы входят, помимо ДГ, источник
питания постоянным током типа ТЕС7М (см. рис.1.7).
Датчики геометрии закреплены на оправе главного
зеркала по схеме, показанной на рис.1.5. Там же приведена их нумерация.
(Нумерация ДГ не совпадает с нумерацией собственно датчиков).
Общий вид конструкции единичного кронштейна с
закреплёнными на нём датчиками осевого и радиального смещения гл. зеркала
показан на фотографии рис.1.6.
Блок питания ДГ расположен на балконе стойки HI рядом с шахтой лифта.
Электрические цепи питания от датчиков и съёма информации проложены в общем
гибком кабеле, соединяющем стойку Н1 с оправой гл. зеркала.
Показания от ДГ в аналоговом виде передаются в блок коммутации, расположенный в
том же месте, что и блок питания и далее в аналого-цифровой преобразователь
УВК. Схема электрических цепей ДГ приведена в документации УВК.
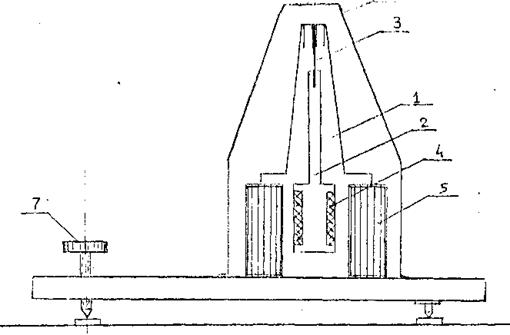
Рис.
1.3. Схематический чертеж индуктивного датчика ЭУ.
I-несущая
рама, 2-маятник, 3-подвес маятника, 4-магпитопровод,
5-катушка
индуктивности, 6-кожух, 7-регулировочный винт.
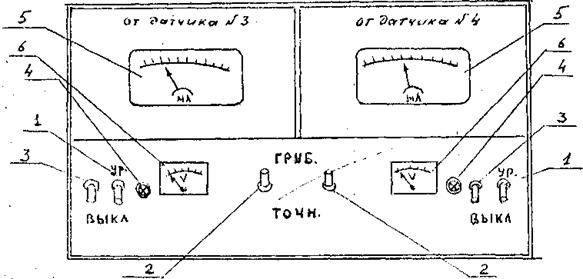
Рис. 1.4. Блок
регистрации и управления.
1,2-тумблеры управления,
3-тумблер включения термостата, 4-индикатор
включения термостата,
5-стрелочный указатель наклона датчиков, 6-вольтметр,
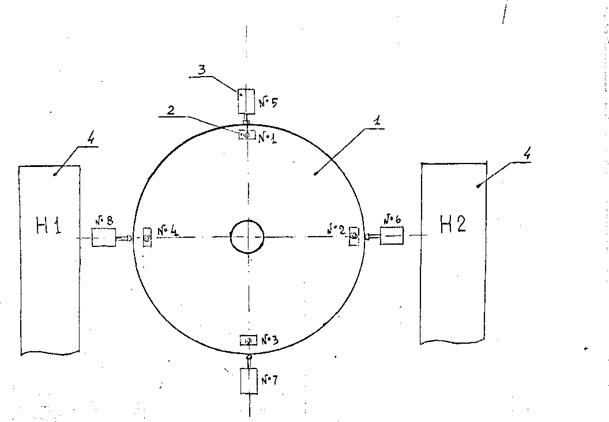
Рис. 1.5. Схема
расположения и нумерация ДГ на оправе главного зеркала. 2-ДГ осевого смещения,
3-ДГ радиального смещения, 1-гл. зеркало,
4-стойки монтировки.
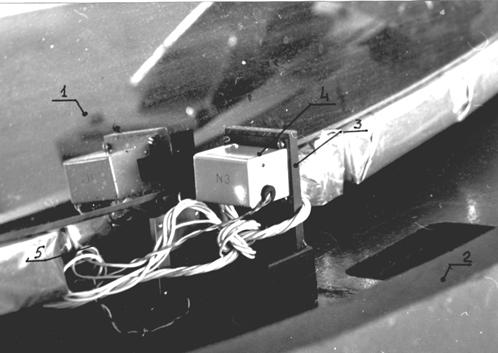
Рис.1.6.
Общий вид кронштейна с датчиками геометрии.
I - гл. зеркало, 2 -
оправа гл. зеркала, 3 - кронштейн,
4-ДГ осевого смещения,
5-ДГ радиального смещения.
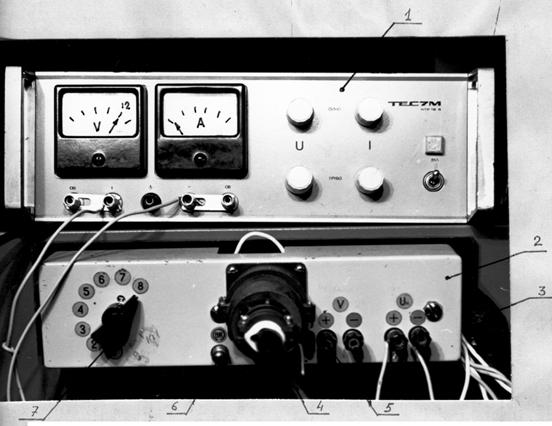
Рис I.7.
Блоки питания к коммутации ДГ.
1-блок
питания, 2-блок коммутации, 3-кабели связи с ДГ,
4-кабелъ
связи с УВК, 5-клеммы подключения контрольного вольтметра,
6-кнопка
контроля напряжения питания ДГ,
7-переключатель,
позволяющий измерять выходные напряжения от каждого ДГ.
В качестве датчиков геометрии использованы
разработанные в ЦНИИГАиК регистраторы линейных перемещений с дистанционным
съемом информации, чувствительным элементом которых служат вращающиеся
потенциометры типа ПТП – II (R=
0,2 - 0,4 ком). Они связаны системой шестерен с измерительными штоками
приборов, касающимися главного зеркала. Информативным сигналом является значение выходного
напряжения зависящего от положения измерительного штока. Кинематическая схема ДГ и схема
электрического подсоединения показаны на рис. I.8. Там же обозначена расцветка проводов, выходящих из ДГ.
Рабочий диапазон перемещений штока ≈
2.5мм, ср. кв. погрешность регистрации положения ≤0,01 мм.
Система оперативного контроля регистрации:
положения главного зеркала в техническом обслуживании не нуждается.
1.5 Система оперативной регистрации температурных удлинений
стоек монтировки телескопа.
Система оперативной регистрации температурных
удлинений стоек вырабатывает сигналы d9
и d10, используемые для расчёта параметра
Δβ. В состав системы входят два датчика геометрии №9 и №10 и
две инварные струны с рычажными натяжителями на стойках монтировки и источник
питания ДГ.
Датчики геометрии того
же типа, что и в системе регистрации положения главного зеркала. В качестве
источника питания используется тот же источник, что и для питания ДГ гл.
зеркала.
Схема расположения ДГ, инварных струн и рычажных
натяжителей показана на рис. 1.9.
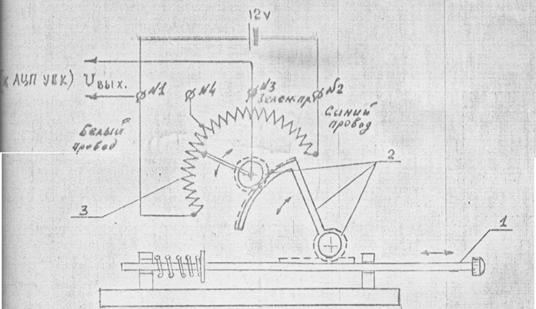
Рис. 1.8. Принципиальная
схема ДГ.
1-подвижный
измерительный шток, 2-умножительная система шестерен,
3-вращающийся
потенциометр, №№ 1![]() 4 -выходные контакты потенциометра.
4 -выходные контакты потенциометра.
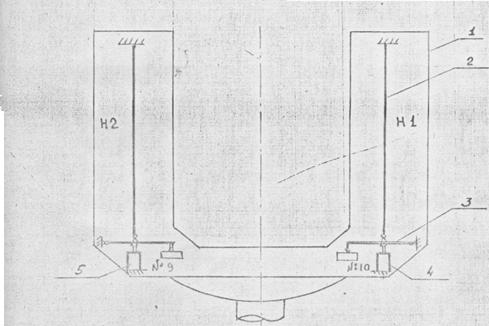
Рис 1.9. Схема
регистрации температурных удлинений стоек.
1- стойка монтировки, 2
– инварная струна, 3 – рычажный натяжитель с грузом, 4 – ДГ №10, 5 – ДГ№9.
Местом установки инварных струн и ДГ выбраны
внешние стенки стоек монтировки, обращенные к лифтовым шахтам. На рис.1.10
приведена фотография рычажного натяжителя и ДГ №10 в лифтовой шахте стойки НI.
Электрические цепи подсоединения, ДГ к источнику
питания и к АЦП УВК аналогичны электрическим цепям ДГ главного зеркала. Данная
система в техническом обслуживании не нуждается.
I.6. Программное обеспечение СКН.
I.6.I. Основная программа СКН.
Расчёт поправок ![]() к расчетным
координатам
к расчетным
координатам ![]() и
и ![]() наблюдаемого объекта
выполняет программный модуль М8, входящий в состав управляющей программы БТА.
Модуль М6 пользуется подпрограммами EXTRA, FLСТ
, FIXT, DG, СNVF, исходный текст которых хранится в файле FLTCC.
наблюдаемого объекта
выполняет программный модуль М8, входящий в состав управляющей программы БТА.
Модуль М6 пользуется подпрограммами EXTRA, FLСТ
, FIXT, DG, СNVF, исходный текст которых хранится в файле FLTCC.
Модуль M8
запускается с периодом 10 секунд. По команде оператора И=32 модуль может быть
выключен из управляющей системы. При этом расчет поправок за рефракцию
сохраняется, а на табло предупредительной сигнализации (ТПС) появляется
сообщение "ВЫКЛ. СКН!" По повторной директиве И=32 модуль М8 вновь
включается в работу, а сообщение "ВЫКЛ. СКН" стирается.
Программа СКН рассчитывает оперативную группу
геометрических параметров после опроса датчиков геометрии (ДГ) телескопа один
раз в 10 секунд. В показания ДГ по особому алгоритму вводятся поправки,
компенсирующие нестабильность напряжения источника питания в пределах ![]() 0.5 вольта от
номинального значения 12 вольт.
0.5 вольта от
номинального значения 12 вольт.
В случае, если напряжение источника питания
выйдет за указанные границы, произойдет аварийное отключение опроса ДГ. Па ТПС
появляется сообщение "ОТКАЗ ДГ! ".
Если показание какого-либо ДГ выйдет за измерительный диапазон, на ТПС появится сообщение "ОТКАЗ ДГ
№…!" и происходит отключение опроса всех ДГ.
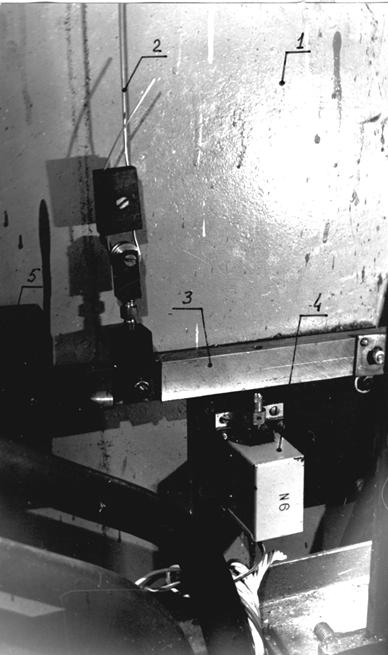
Рис. 1.10. Конструкция
регистратора температурных удлинений стойки НI 1- стойка монтировки, 2 - инварная струна,
3 - рычажный натяжитель, 4 - груз, 5
- ДГ №10.
Программа СКН построена
таким образом, что при аварийном отключении опроса ДГ, модуль М8 для дальнейших
расчётов пользуется показаниями ДГ, предшествовавших аварийному отключению.
Если напряжение питания или же показания ДГ
войдут в установленные допуски, опрос ДГ возобновляется и аварийные сообщения
на ТПС стираются. Группы стабильных и периодически возобновляемых
геометрических параметров находятся в файле CONAR. Файл CONAR состоит из трёх независимых полей, из которых поле I
образует группа периодически обновляемых параметров ![]()
![]() ,
,
![]() и ϰ (т. н. I-я группа параметров),
поле II - группа стабильных параметров
и ϰ (т. н. I-я группа параметров),
поле II - группа стабильных параметров ![]() (т. н. поле
констант), поле III - две таблицы периодически обновляемых
параметров
(т. н. поле
констант), поле III - две таблицы периодически обновляемых
параметров ![]() .
.
Каждое поле файла CQNAR может
быть изменено независимым образом. Поля I и III можно изменять
оперативно. Поле II защищено от вмешательства оператора и
может быть изменено только системными средствами. Все процедуры изменения полей
I. и II CONAR, контрольных индикаций
показаний ДГ и выполнения подготовительных и тестовых расчётов обеспечиваются
сервисными программами СКН.
1.6.2.Сервисные программы
СКН.
Файл CONAR формируется программой CHWR, исходный текст которой хранится в файле CHWRS.
Для расчёта
поправок ![]() ∆ϰ к периодически обновляемым параметрам
∆ϰ к периодически обновляемым параметрам ![]() ,
,
![]() и ϰ (поле I CONAR) программа CHWR использует программу WAYNR обработки поля ошибок наведений, исходный текст которой
хранится в файле WANRS. Программа
WAYNR пользуется файлом поля ошибок JCON, который создаётся по
данным измерений поля ошибок наведений редактором символьной информации.
и ϰ (поле I CONAR) программа CHWR использует программу WAYNR обработки поля ошибок наведений, исходный текст которой
хранится в файле WANRS. Программа
WAYNR пользуется файлом поля ошибок JCON, который создаётся по
данным измерений поля ошибок наведений редактором символьной информации.
Для формирования периодически обновляемых
параметров ![]() (поле III CONAR)
программа CHWR использует программу KSI, исходный текст
которой находится в файле KSI.S
(поле III CONAR)
программа CHWR использует программу KSI, исходный текст
которой находится в файле KSI.S
Для проверки и печати всех: заложенных в CONAR стабильных
и периодически обновляемых параметров БТА служит программа CHRD. Эта же программа позволяет индицировать и
печатать текущие показания ДГ и значение UP питающего ДГ напряжения (UP должно
лежать в пределах 8.00 ![]() 9.00 при номинальном
значении 8.80).
9.00 при номинальном
значении 8.80).
Для тестовой проверки текущих показаний ДГ и выполнения контрольных расчётов поправок
![]() и
и ![]() , без учета суточной аберрации и рефракции, служит программа GDG, исходный текст которой находится в файле
GDGS.
, без учета суточной аберрации и рефракции, служит программа GDG, исходный текст которой находится в файле
GDGS.
Программа GDG аналогична программному
модулю М8, но не содержит процедуру расчёта поправок за рефракцию и суточную
аберрацию. С помощью GDG обеспечивается регистрация и распечатка фактических
показании ДГ. Значения питающего
напряжения ДГ и выполняется на основе геометрических параметров БТА, хранящихся
в файле CONAR, контрольный расчет
поправок ![]() и
и ![]() . Для этих расчётов можно использовать как фактические
показания ДГ, так и произвольные, задаваемые оператором. При этом значения А и Z
вводятся оператором.
. Для этих расчётов можно использовать как фактические
показания ДГ, так и произвольные, задаваемые оператором. При этом значения А и Z
вводятся оператором.
Логическое взаимодействие модуля М8 и сервисных
программ СКН показано на рис.1.11, где двойная связь означает логическое
взаимодействие плюс передачу значений параметров, а одинарная - только передачу
значений параметров.
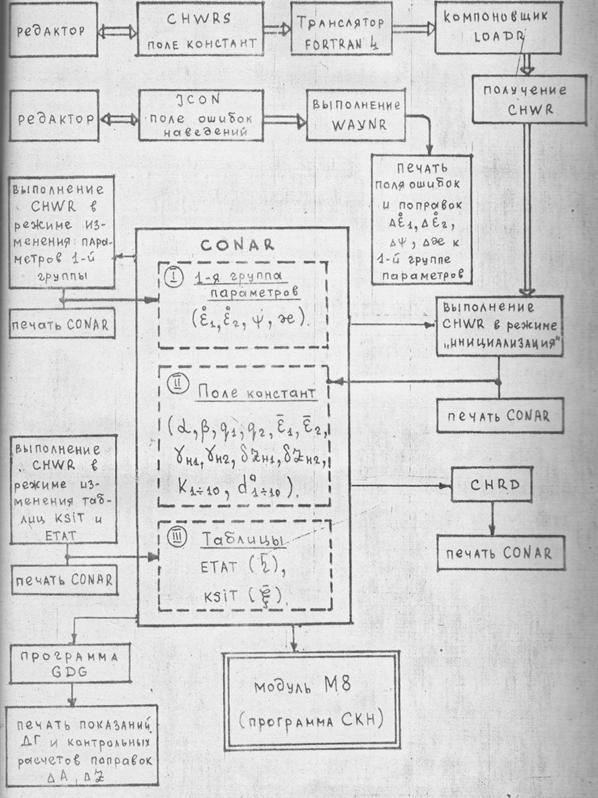
Рис 1.11. Блок – схема логического взаимодействия основной М8 и
сервисных программ СКН
II. ИНСТРУКЦИЯ ПО ЭКСПЛУАТАЦИИ
2.1. Порядок запуска СКН и состав работ по её эксплуатации.
2.1.1..Для запуска СКН
необходимо включить питание ДГ.
2.1.2. Для поддержания
точности наведения и слежения, обеспечиваемой СКН, необходимо с заданной
периодичностью выполнять привязку времени и определение новых значений
обновляемых параметров. С этой целью исполнять следующие процедуры, описываемые
в п.п.2.2 и 2,3 настоящей инструкции:
- привязку шкалы хронометра УВК (Ч715) к системе
времени UT1 -
один раз в 10 суток; (Указанная процедура в настоящей ИЭ не описывается)
- определение параметров ![]() ,
, ![]() (измерение
вертикальности 1-й оси вращения) - один раз в 4 месяца;
(измерение
вертикальности 1-й оси вращения) - один раз в 4 месяца;
- измерение поля ошибок наведений - один раз в 4
месяца;
- расчёт и введение в файл CONAR новых
значений обновляемых параметров после выполнения двух последних процедур.
2.1.3. В случае отказов СКИ или резкого
ухудшения точности наведения, выполнить контрольные проверки функционирования
элементов СКН и его программного обеспечения. Описание этих процедур изложено в
п.2. 5.
2.2
Определение параметров ![]() ,
, ![]() и изменение данных поля III файла CONAR
и изменение данных поля III файла CONAR
Определение параметров ![]() ,
, ![]() выполняется с
помощью аппаратуры контроля положения I-й
оси вращения телескопа (см.п.1.3 технического описания). Все необходимые
измерения выполняются
выполняется с
помощью аппаратуры контроля положения I-й
оси вращения телескопа (см.п.1.3 технического описания). Все необходимые
измерения выполняются
в день, предшествующий ночи измерения ноля
ошибок, в следующем порядка;
2,2.1. Подготовить
журнал измерений по образцу, показанному на рис.2.1 и записать в него дату
выполнения измерений, время
начала измерений и фамилию наблюдателя.
2.2.2. В помещении, где установлен электронный
уровень, подключить к розетке телефонный аппарат для связи с ЦПУ. Его номер
6-22 (место установки аппарата доказано на рис. 1.2).
2.2.3. Проверить, что тумблеры 2 .(см. рис.1.4)
находятся в положении вверх ("грубо"), а тумблеры I и 3 - в положении
вниз ("выкл").
2.2.4. Включить блок питания ЭУ. О его включении
сигнализирует контрольная лампа блока питания.
2.2.5. Включить тумблером I блок регистрации и
управления. При этом на вольтметрах 6 должно установиться напряжение 13 ![]() 1вольт.
1вольт.
2.2.6. Подать команду на ЦПУ на включение
маслопитания гидростатических подшипников 1-й оси и установку телескопа на
азимут А = - 180°![]() 2°.
2°.
2.2.7. После того, как
телескоп установится на заданном азимуте, проверить, чтобы стрелки указателей 5
находились на отсчётах 7![]() 1 деления. В ином случае, вращением винта 7 соответствующего
датчика (см. рис. 1.3) установить стрелку на требуемый отсчет.
1 деления. В ином случае, вращением винта 7 соответствующего
датчика (см. рис. 1.3) установить стрелку на требуемый отсчет.
2.2.8. Переключить тумблеры 2 вниз
("точно"). При этом стрелки указателей 5 должны быть на отсчётах 25 ![]() 2. В ином случае,
вращением винта 7 соответствующего датчика установить стрелку требуемый отсчёт.
2. В ином случае,
вращением винта 7 соответствующего датчика установить стрелку требуемый отсчёт.
ВНИМАНИЕ! Винт 7 в режиме "Точно” вращать очень
осторожно.
2.2.9. Записать отсчёты стрелочных указателей 5 от датчиков №3 и №4 в целых
делениях шкал в графы 2 и 5 журнала измерений на строке А=-180°.
2.8.10. Подать команду ив ЦПУ на
установку телескопа на
азимут
А = - 90° ![]() 2° и после полной остановки вращения записать показания
датчиков в графы 2 и 5 журнала на строке А = -90º. Повторить аналогичные
действия на установках А = 0°
2° и после полной остановки вращения записать показания
датчиков в графы 2 и 5 журнала на строке А = -90º. Повторить аналогичные
действия на установках А = 0°![]() 2°
и А =+90°
2°
и А =+90°![]() 2°.
2°.
2.2.11. Провести телескоп до азимута 95°![]() 100° и, при вращении в обратном направлении, на установках А
= + 90°, 0°, -90° и -180° выполнить действия, аналогичные описанным в п.2.2.10.
Записи в журнале вести в колонках 3 и 6 против соответствующих значений
азимутов.
100° и, при вращении в обратном направлении, на установках А
= + 90°, 0°, -90° и -180° выполнить действия, аналогичные описанным в п.2.2.10.
Записи в журнале вести в колонках 3 и 6 против соответствующих значений
азимутов.
2.2.12. Поставит тумблеры в исходное положение:
тумблеры 2 - вверх ("грубо"),
тумблеры I - вниз ("выкл.") и
отключить блок питания от сети.
2.2.13. Записать время окончания измерений.
2.2.14. Вычислить и
записать в графах 4 и 7 журнала средние значения отсчётов из прямого и
обратного направления вращения телескопа.
2.2.15. На свободном поле журнала вычислить с
контролем во вторую руку значения параметров ![]() ,
, ![]() используя следующие
формулы:
используя следующие
формулы:
![]() ,
,
![]()
ВНИМАНИЕ! В случае если значения ![]()
![]() ,
, ![]() , по модулю превысят 2", лицо, выполнившее вычисления,
обязано немедленно уведомить об этом руководителя механического участка СЭК
БТА.
, по модулю превысят 2", лицо, выполнившее вычисления,
обязано немедленно уведомить об этом руководителя механического участка СЭК
БТА.
Журнал
измерения вертикальности 1-й оси.
Дата 06 февраля 1986г. Фамилия наблюдателя
Тначало
15ч. 40 мин. Черепков
В.М.
Токонч.
16ч. 15 мин.
|
Азимут установки (А) |
U3 |
U4 |
||||
|
Прямо ↓ |
Обр. ↑ |
Ср. |
Прямо ↓ |
Обр. ↑ |
Ср. |
|
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
- 180º - 90° 0º + 90° |
26 28 21 18 |
25 28 22 17 |
25.5 28.0 21.5 17.5 |
24 14 7 16 |
24 14 7 16 |
24.0 14.0 7.0 16.0 |
![]()
![]()
(Подпись
наблюдателя)
Проверил (фамилия и подпись лица, проверившего
вычисления)
Рис.
2.1. Образец
журнала измерений вертикальности I-й
оси вращения.
2.2.16.
Включить управляющую программу УВК и вызвать программу CHWR. В режиме ”ИЗМЕНЕНИЕ ТАБЛИЦ KSIT и ЕТАТ на запрос о значениях KSIX и ЕТАХ
ввести полученные значения ![]() (KSIX) и
(KSIX) и ![]() (ЕТАХ). Далее
произойдет программный расчёт таблиц
(ЕТАХ). Далее
произойдет программный расчёт таблиц ![]() (KSIT) и
(KSIT) и
![]() (ЕТАТ) и их
автоматическое введение в поле III
файла CONAR.
(ЕТАТ) и их
автоматическое введение в поле III
файла CONAR.
2.3. Измерение поля ошибок наведений и введение поправок в
данные поля I файла CONAR.
Измерение поля ошибок наведений выполняется в
первичном фокусе телескопа в следующем порядке (п.п.2.3.1 и 2.3.2) описывают
подготовительную часть и исполняются в дневное время, предшествующее
наблюдениям.
2.3.1. Подготовить
журнал наблюдений, образец которого приведен на рис.2.2.
2.3.2. Установить в стакане первичного фокуса
кассету Ричи (КР) с окуляром. При этом подвижные части КР должны находиться в
положениях, которые задаются отсчётами, показанными на рис.2.3.
2.3.3. Схема наведений
телескопа такова, чтобы наблюдаемые звезды располагались в зоне ![]() 20° от южной и
северной полуплоскостей меридиана и от западной и восточной полуплоскостей
первого вертикала, на зенитных
расстояниях от 6º до 75° с шагом - 10
20° от южной и
северной полуплоскостей меридиана и от западной и восточной полуплоскостей
первого вертикала, на зенитных
расстояниях от 6º до 75° с шагом - 10![]() 20°. Общее число
наблюдаемых звезд должно быть не менее 20.
20°. Общее число
наблюдаемых звезд должно быть не менее 20.
2.3.4. Помощник наблюдателя, находящийся на ЦПУ
подбирает звезды из Астрономического Ежегодника исходя из заданной в п.2.3.3
схемы и оптимального порядка движения телескопа. В УВК вводятся только видимые координаты выбранной звезды на дату наблюдения.
2.3.5.
После окончания этапа наведения, т.е. когда значения рассогласований по обоим
датчикам вал-код будут равны 0'' ![]() 0.3'', оператор ставит
об этом в известность наблюдателя, находящегося в стакане первичного фокуса.
Последний, рассматривая изображение звезды в окуляр КР, отсчитывает по
координатной сетке значения
0.3'', оператор ставит
об этом в известность наблюдателя, находящегося в стакане первичного фокуса.
Последний, рассматривая изображение звезды в окуляр КР, отсчитывает по
координатной сетке значения ![]() и
и ![]() в целых секундах.
в целых секундах.
Журнал измерения поля ошибок
16/17 октября
1986г. Наблюдал
Тихонов Н.А.
Записал Ерохин
В.М.
|
№ п.п. |
№ по АЕ |
A º ʹ |
Z º ʹ |
uz ʺ |
uγ |
Примечание |
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
|
|
|
|
|
|
|
Перенаведение см.№6 |
|
1 |
16 |
227 01 |
7 05 |
-6 |
-9 |
|
|
2 |
32 |
225 11 |
11 11 |
+10 |
-9 |
|
|
3 |
712 |
272 44 |
30 44 |
-5 |
-10 |
|
|
4 |
99 |
278 36 |
45 26 |
-6 |
-12 |
|
|
5 |
562 |
266 45 |
24 36 |
-5 |
-10 |
|
|
6 |
32 |
253 52 |
8 38 |
-4 |
-9 |
|
|
7 |
136 |
269 57 |
57 49 |
-4 |
-12 |
|
|
8 |
136 |
271 14 |
56 29 |
-5 |
-15 |
|
|
|
|
|
|
|
|
|
|
9 |
11 |
21 53 |
10 39 |
-7 |
-10 |
|
|
10 |
36 |
344 01 |
29 10 |
-6 |
-10 |
|
|
11 |
25 |
359 38 |
35 49 |
-5 |
-10 |
|
|
12 |
591 |
4 50 |
54 28 |
-7 |
-13 |
|
|
13 |
22 |
2 40 |
73 05 |
-6 |
-16 |
|
|
|
|
|
|
|
|
|
|
14 |
504 |
92 22 |
60 58 |
-6 |
-16 |
|
|
15 |
542 |
90 25 |
38 06 |
-6 |
-11 |
|
|
16 |
579 |
97 47 |
18 58 |
-5 |
-10 |
|
|
17 |
707 |
106 34 |
13 35 |
-6 |
-9 |
|
|
|
|
|
|
|
|
|
|
18 |
28 |
166 18 |
11 51 |
-5 |
-8 |
|
|
19 |
45 |
186 36 |
20 09 |
-6 |
-9 |
|
|
20 |
51 |
184 16 |
28 53 |
-6 |
-9 |
|
|
21 |
№3 |
179 11 |
42 33 |
-6 |
-11 |
|
|
22 |
341 |
178 26 |
58 39 |
-6 |
-15 |
|
|
23 |
338 |
178 12 |
71 49 |
-4 |
-17 |
Рис. 2.2 Образец журнала
измерений поля ошибок наведений.
Отсчет 0º Отсчет 358º Отсчет 0º
Отсчет
32, 75 (винт γ)
Отсчет 0º Отсчет 25,72 (винт Z)
Рис.
2.3. Установочные отсчеты кассеты
Координатная
сетка имеет шаг 10". На рис.2.4.
показан вид в окуляр координатной сотки с изображением звезды. Там же приведены
отсчеты ![]() ,
, ![]() для данного положения
центра изображения звезды.
для данного положения
центра изображения звезды.
ВНИМАНИЕ! При первом наведении проверить фокусировку,
рассматривая изображение звезды слева и справа, в пределах поля зрения окуляра.
Если при этом изображение смещается относительно сетки, откорректировать
положение фокусировочной выдвижки СПФ с местного пульта управления.
2.3.6. Продиктовать
значения ![]() и
и ![]() на ЦПУ.
на ЦПУ.
2.3.7.Помощник
наблюдателя записывает ![]() и
и ![]() , азимут А и зенитное расстояние Z наблюденной звезды и её
номер по АЕ в журнал измерения поля ошибок (образец записей приведен на
рис.2.2).
, азимут А и зенитное расстояние Z наблюденной звезды и её
номер по АЕ в журнал измерения поля ошибок (образец записей приведен на
рис.2.2).
2.3.8. В УВК вводятся
координаты нового объекта, и повторяются процедуры, описанные в п.п.2.3.5![]() 2.3.7 до завершения
всей
2.3.7 до завершения
всей
программы наблюдений.
2.3.9. В случае если
значения ![]() или
или ![]() для какой-либо звезды
будут значительно отличаться от средних, в выполненной программе наблюдений,
необходимо выполнить перенаведение на эту звезду, с повторной выборкой видимых
координат из АЕ, или же наведение на другую звезду в этой области неба. При
подтверждении промаха, указанное измерение исключается из последующей
обработки.
для какой-либо звезды
будут значительно отличаться от средних, в выполненной программе наблюдений,
необходимо выполнить перенаведение на эту звезду, с повторной выборкой видимых
координат из АЕ, или же наведение на другую звезду в этой области неба. При
подтверждении промаха, указанное измерение исключается из последующей
обработки.
2.3.10. Создать файл
ошибок JCОN, используя
редактор символьной информации EDI . При вводе данных не допускать пробела между знаком ошибки
наведения и его значением. Начало файла должно содержать дату наблюдений в
произвольном формате. Файл должен заканчиваться директивой /END .
Дата наблюдений и заключительная директива /END являются комментарием и
обрабатывающей программой игнорируется.
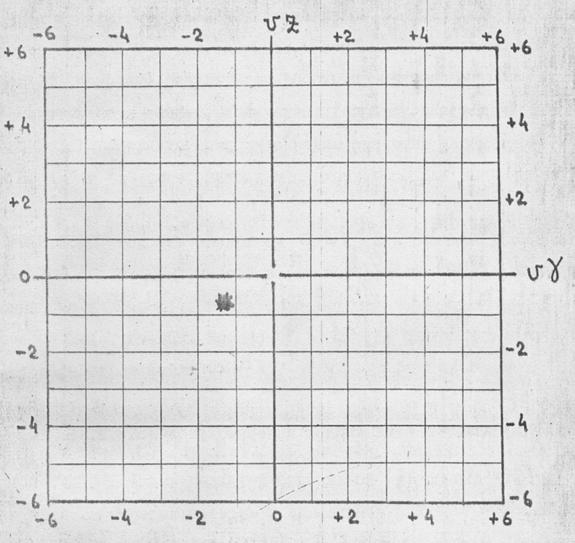
Рис.2.4.
Вид на координатную сетку с изображением звезды. (Отсчеты ![]() = -7",
= -7", ![]() = - 13").
= - 13").
2.3.11. Вызвать программу WAYNR ,
которая выполняет обработку поля ошибок (файла JCON) c
целью нахождения поправок
![]() , ∆ϰ,
, ∆ϰ, ![]() ,
, ![]() . Полученные значения поправок
представляются соответствующими символами
д. ПCИ, д. KAППА, д. ЭПС1, д. ЭПС2. Кроме
указанных поправок обработка вычисляет значение ср. квадратической остаточной
ошибки наведения по составляющим MZ, MG и результирующей М в
угл. секундах. Значение М не должно превосходить 3". Конечным, результатом
работы программы WAYNR является
распечатка поля ошибок, полученных поправок и остаточной ошибки.
. Полученные значения поправок
представляются соответствующими символами
д. ПCИ, д. KAППА, д. ЭПС1, д. ЭПС2. Кроме
указанных поправок обработка вычисляет значение ср. квадратической остаточной
ошибки наведения по составляющим MZ, MG и результирующей М в
угл. секундах. Значение М не должно превосходить 3". Конечным, результатом
работы программы WAYNR является
распечатка поля ошибок, полученных поправок и остаточной ошибки.
2.3.12. Вручную вычислить новые значения
параметров ![]() , ϰ,
, ϰ, ![]() ,
, ![]()
алгебраическим сложением старых значений с
полученными поправками.
2.3.13. Вызвать программу CHWR и в режиме
"ИЗМЕНЕНИЕ ПАРАМЕТРОВ I-Й
ГРУППЫ" ввести в I-е
поле файла CONAR новые значения ![]() , ϰ,
, ϰ, ![]() ,
, ![]() .
.
2.3.14. Вызвать
программу CHRD и
отпечатать значения всех параметров файла CONAR.
2.4. Порядок изменения
данных поля II файла CONAR .
2.4.1. Вызвать редактор
символьной информации EDI.
2.4.2. Отредактировать в символьном файле CHWRS значения
параметров поля II файла CONAR.
2.4.3. Записать отредактированный файл CHWRS .
2.4.4. Странслировать файл CHWRS транслятором
FORTRAN4.
2.4.5. Уничтожить файл CHWR .
2.4.6. Обработать перемещаемый файл
компоновщиком LOADR.
2.4.7. Создать абсолютный загрузочный модуль
директивой: SТ, Р.
2.4.8.Вызвать вновь
созданную программу CHWR в
режиме "ИНИЦИАЛИЗАЦИЯ". Программа CHWR в этом режиме
автоматически запишет значения параметров поля II в файл CONAR.
2.5. Проверка функционирования элементов СKН.
Необходимость в проверках СКН возникает при:
- появлении на ТПС
сигнализации "ОТКАЗ ДГ! ";
- появлении па ТПС
сигнализации " ОТКАЗ ДГ №…!"
- резкого ухудшения
точности наведения. В этом случае необходимо директивой И = 32 отключить СКН и,
в случае необходимости, исключить расчёт рефракции, введя значение В = 000.
Во всех указанных случаях к проверке СКН
приступать только после окончания плановых астрономических наблюдений текущей
ночи.
2.5.1. В случае
появления сигнализации "ОТКАЗ ДГ!" необходимо последовательно
выполнить следующие операции:
- проверить исправность
блока питания ДГ, расположенного на балконе стойки HI. Напряжение питания на вольтметре блока
должно быть равно 12 ![]() 0,1 вольта;
0,1 вольта;
- вызвать программу GDG и убедиться в том, что
значение UP находится
в пределах 8,00 ![]() 9,00;
9,00;
-
если значение UP выходит
за указанные пределы, проверить исправность электрических цепей "блок
питания -ДГ-РИМ1-АЦП УВК".
2.5.2. В случае появления сигнализации
"ОТКАЗ ДГ №…!" необходимо последовательно выполнить следующие, операции:
- проверить крепление
датчика указанного номера (нумерация ДГ показана на рис.1.5 и 1.9) к
конструкции телескопа. При этом шток датчика должен находиться примерно в
середине своего измерительного диапазона. Если обнаружится смещение датчика,
восстановить его положение, добившись, чтобы выходное измерительное напряжение
с погрешностью 0,2 вольта стало равно нулевому показанию dº![]() этого датчика. Контроль установки выполнить с помощью любого
вольтметра с погрешностью измерения
этого датчика. Контроль установки выполнить с помощью любого
вольтметра с погрешностью измерения ![]() 0,1 вольта.
0,1 вольта.
Выполнить
аттестацию телескопа по методике, изложенной в п.2.3:
-
проверить, нет ли "зависания" штока ДГ или заедания при смещении его рукой. При обнаружении
этих неисправностей датчик необходимо демонтировать и в лабораторных условиях,
сняв защитный кожух, промыть техническим спиртом все трущиеся детали и смазать
их смазкой МП-609 (ТУ 3810176-81) или ОКБ -122-3 или ОКБ -122-4.
После проверки работоспособности, установить ДГ
на место, используя методику устранения предыдущей неисправности. Выполнить
аттестацию телескопа по методике, изложенной в п.2.3;
- подключить вольтметр непосредственно к
выходным контактам ДГ и, вручную смещая измерительный шток, проверить изменение
измерительного напряжения. Если будет обнаружено, что вольтметр не реагирует на
испытуемое воздействие, датчик демонтировать и в лабораторных условиях
выполнить ревизию и необходимый ремонт. Порядок, установки датчика на место
описан выше. Выполнить аттестацию телескопа по методике, изложенной в п.2.3;
- проверить электрические цепи "блок
питания - ДП№..-РИМ1-АЦП УВК"
2.5.3. В случае резкого
ухудшения точности наведения при отсутствии аварийной сигнализации на ТПС
необходимо последовательно выполнить следующие операции: .
- при ухудшении точности наведения по обеим
координатам проверить содержимое файла CONAR. Для этого вызвать
программу CHRD и
распечатать параметры, хранящиеся во всех полях файла CONAR. Сличить эти данные с зафиксированными при
последней аттестации телескопа (см. п.2.3.14). В случае расхождений, внести
необходимые исправления с помощью процедур, описанных в п.п. 2.2.16, 2.3.13 и
2.4;
- при ухудшении точности наведения по обеим
координатам проверить правильность программных расчетов. Для этого отключить
питание ДГ на стойке H1, отключить и вновь
включить СКН
(директива И = 32, И = 32), ввести координаты L = S
(текущее звездное время), D = 90 00 00,0, давлений
воздуха B=000. Расчётные значения поправок должны быть равны:
![]() ϐA = 16,4"+
ϐA = 16,4"+![]() ϰ±3ʺ;
ϰ±3ʺ;
ϐ![]()
Необходимые значения параметров ![]() (epsilon 01),
(epsilon 01),
![]() (epsilon 02),
(epsilon 02),
![]() (psi) и ϰ (kap)
для выполнения контрольных расчётов по вышеприведенным формулам выбрать из
распечатки данных файла CONAR. В случае расхождений в значениях
(psi) и ϰ (kap)
для выполнения контрольных расчётов по вышеприведенным формулам выбрать из
распечатки данных файла CONAR. В случае расхождений в значениях ![]() ϐA и ϐZ более чем на 3" c
расчётными, провести ревизию программного модуля М8;
ϐA и ϐZ более чем на 3" c
расчётными, провести ревизию программного модуля М8;
- при ухудшении точности
наведения по обеим координатам проверить правильность программных расчётов. Для
этого вызвать тестовую программу GDG,
набрать значения di, равные нулевым
значениям ![]() , UP =
8,81 и ввести А = 180°, Z = 60°. При этих исходных данных значения поправок
должны быть равны:
, UP =
8,81 и ввести А = 180°, Z = 60°. При этих исходных данных значения поправок
должны быть равны:
DELTA А (ПФ)
= (14.9"- 0.58![]() + 1.15ϰ+
+ 1.15ϰ+![]() )
±0.5",
)
±0.5",
DELTA Z (ПФ) = (9.9"
+ ![]() ) ± 0.5"
) ± 0.5"
При совпадении расчётных
поправок ввести новые значения показании di, приняв их равными
d1=dº1,
d2=dº2,
d3=dº3 + 1.00,
d4=dº4 + 1.00,
d5=dº5
d6=dº6
d2=dº2
d7=dº7
+ 1.00,
d8=dº8
+ 1.00,
d9=dº9,
d10=dº10
+ 1.00,
Значения поправок для A = 180º, Z=60º рассчитанные УВК, должны быть равны
DELTA А
(ПФ) = (60.1"- 0.58![]() + 1.15ϰ+
+ 1.15ϰ+![]() )
±0.5",
)
±0.5",
DELTA Z (ПФ) = (34.6" +![]() ) ± 0.5"
) ± 0.5"
В противном случае
необходимо выполнить ревизию программного: модуля М8;
- при ухудшении
точности: наведения по Z проверить правильность;
введения метеорологических параметров в программу СКН. Для этого измерить барометром-анероидом давление воздуха с
погрешностью не более 1мм рт. ст., а с помощью ртутного термометра
- температуру наружного
воздуха с погрешностью не более 1°С. Если
обнаружится расхождение между измеренными значениями метеопараметров и.
индуцируемых на TПC более
чем на
- при ухудшении точности наведения по Z,
проверить правильность расчётов поправки за рефракцию. Для этого включить
программу BEGIN,
отключить СКН директивой И=32 и ввести дополнительную директиву И=03. Задать
координаты L=S (текущее звездное
время), D =-26
21 00.0 и метеопараметры В= 800, ТМ. =-20. В результате
программного расчёта на ТПС должны индицироваться следующие значения поправок:
ϐA =0,
ϐZ=-
3'06.3''
В противном случае
выполнить ревизию программной части расчета
поправок за рефракцию модуля М8;
Отчет-справка
пос. Нижний Архыз
19 августа
Настоящий отчёт-справка составлен по результатам
выполненных 17, 18 августа
Целью
работ было уточнение первой части численного значения параметра ![]() - постоянной «нуля»
ДOC-Z, входящей
в уравнения коррекции наведения телескопа (СКН БТА).
- постоянной «нуля»
ДOC-Z, входящей
в уравнения коррекции наведения телескопа (СКН БТА).
Определения
выполнялись на измерительной установке, включающей в себя разработанный и
изготовленный для данного вида работ «Горизонт Искусственный» (ГИ) и, входящие
в состав юстировочной аппаратуры телескопа автоколлиматор АКБ №3 и
подсвечиваемая марка (крест СПФ в последующем КСПФ) в первичном
фокусе (ПФ БТА). Автоколлиматор АКБ и ГИ закреплялись на внешней стороне кожуха
СПФ таким образом, чтобы была обеспечена видимость в АКБ на визирную ось
телескопа, задаваемую маркой в ПФ и на автоколлимационное изображение от
свободно висящего зеркала в ГИ, нормаль к которой устанавливается по отвесной
линии со средней квадратической погрешностью порядка ± 0,15″÷
0,2″. Смотри схему рис.1.
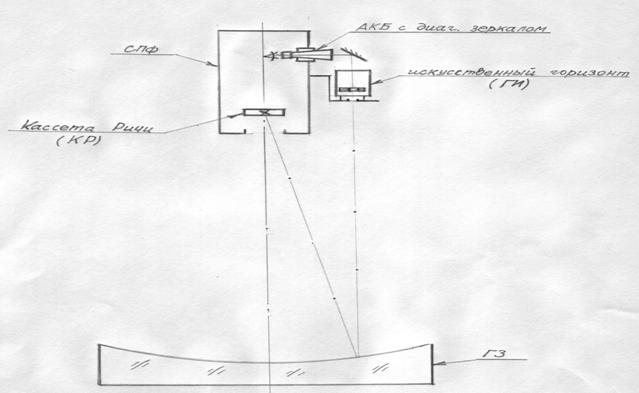
рис.1
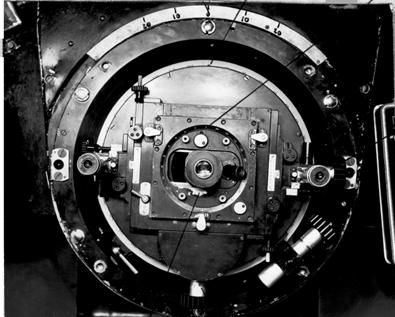
На рис.2 показаны
установка КСПФ и лампы подсветки. При этом положение фокусировочной
подвижки равно 140,9. Положение поворотного стола Р2=1320.
На рис.3 показаны
установка АКБ№3 и ГИ.
После предварительной
установки КСПФ, АКБ№3, ГИ
необходимо провести их точную установку и юстировку при открытом ГЗ. Для
этого поднять трубу до Z=600, открыть
крышки ГЗ, провести юстировку и вновь положить трубу в горизонт.
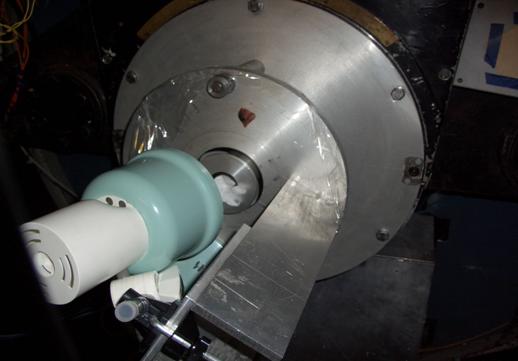
рис.2

рис.3
Измерительная процедура
определения положения «нуля» ДOC-Z
заключалась в установке визирной оси VСПФ БТА в вертикальное
положение в пределах ± 40″, и измерения микрометрами АКБ фактического
зенитного расстояния от отвесной линии, заданной ГИ. В этом положении
фиксировались отсчет Е по DOC-Z и азимут установки монтировки.
Программа измерений состояла из трех циклов, в
каждом из которых труба от Z ~ 60о поднималась
до Z = 0о и под контролем ГИ её визирная ось VСПФ
приводилась в отвесное положение в заданных выше пределах. Снимались по 5
отсчетов по микрометру МI АКБ на а/к изображение от зеркала ГИ в его положении
0о, по 5 отсчетов – при положении ГИ 180о, и по 5
отсчетов на VСПФ. В первом и последующих циклах труба
устанавливалась на одно и то же значение Е по ДOC-Z.
Для контроля положения ГЗ в оправе в каждом
цикле измерений снимались показания часовых индикаторов №№ 1 и 3, (контроль в меридиональной плоскости)
и №№ 2, 4 (контроль в сагиттальной плоскости) дополнительно проверяющих
положение ГЗ в каждом цикле. По этим отсчетам установлено, что в каждом цикле
ГЗ занимало неизменное место в оправе с точностью
Запись в журнал
измерений вел оператор ЦПУ.
Результат обработки
журнала отсчетов по микрометру МI АКБ на ГИ и VСПФ приводится ниже в
таблице 1.
Таблица 1
|
№ цикла |
Средние
отсчеты в деления микрометра МΙ АКБ |
D = МΙги – МΙV |
|
|
МΙги (±m) |
МΙV (±m) |
||
|
1 |
44.96 (0,45) |
27.20 (0,45) |
+ 17,76 |
|
2 |
41.94 (0,62) |
26.44 (0,33) |
+ 15,5 |
|
3 |
43.76 (0,50) |
27.76 (0,22) |
+ 16,00 |
|
Средняя
разность |
+ 16,42
(дел) |
||
Для последующего расчета
значения ε2 «нуля» ДOC-Z
использованы данные этой таблицы, ближайшие по времени определения среднего
положении вертикальной (первой) оси вращения и малая поправка за
систематические колебания оси от
среднего положения, полученные при исследованиях осевых систем телескопа в 80
–х прошлого столетия.
Вычисление выполнено по общей формуле ![]() , где
, где
![]() - искомая постоянная
«нуля» ДOC-Z;
- искомая постоянная
«нуля» ДOC-Z;
Е -
отсчет по ДOC-Z;
![]() =Δ х
2,1″ -- вычисление фактического
зенитного положения визирной оси VСПФ по отсчетам МΙги и
МΙV микрометра АКБ на изображение марки в ПФ и на
а/к изображение в ГИ;
=Δ х
2,1″ -- вычисление фактического
зенитного положения визирной оси VСПФ по отсчетам МΙги и
МΙV микрометра АКБ на изображение марки в ПФ и на
а/к изображение в ГИ;
η(![]() ) = δηА –
) = δηА –![]() SinА +
SinА + ![]() CosA,
CosA,
где
![]() и
и ![]() - составляющие ср.
положения первой оси вращения из ближайших по времени определений, А – азимут
установки, на которой выполнялись измерения;
- составляющие ср.
положения первой оси вращения из ближайших по времени определений, А – азимут
установки, на которой выполнялись измерения;
Численные
значения входящих в представленных уравнениях параметров приведены в
нижеследующей таблице 2
Таблица 2
|
№
п.п |
Параметр |
Численное
значение (о ′ ″) |
Источник |
|
|
1 |
А |
46о |
Отсчет по ДОС-А |
|
|
2 |
Е |
-
00 о 02′ 02″,2 |
Отсчет по ДOC-Z |
|
|
3 |
D |
+
16,42 |
Таблица 1 |
|
|
4 |
|
|
Средняя составляющая
не вертикальности 1-й оси вращения монтировки в меридиональной плоскости по данным определений 14
августа.2013 г. |
|
|
5 |
|
-
2″,8 |
То же в плоскости 1-го
вертикала |
|
|
6 |
δηА |
+ 0″,6 |
Поправка для перехода
от среднего положения 1-й оси вращения к истинной оси. Выбрана из табличных
данных материалов исследования БТА в 80-х годах прошлого века |
|
Полученное
по этим данным и вышеприведенным формулам значение постоянной «нуля» составило ![]() = – 85″,0 ± 1,2″.
= – 85″,0 ± 1,2″.
Для перехода от ![]() к
периодически обновляемому параметру
к
периодически обновляемому параметру ![]() , входящему
в уравнения СКН БТА, необходимо в ближайшие технические ночи определить
поправку Δε2 согласно процедурам, изложенным в ТО и ИЭ СКН БТА
, входящему
в уравнения СКН БТА, необходимо в ближайшие технические ночи определить
поправку Δε2 согласно процедурам, изложенным в ТО и ИЭ СКН БТА
Большое значение
полученной поправки в показания ДOC-Z в
сравнении с предыдущими значениями позволяет предположить наличие
предшествовавшего механического воздействия не намеренного характера на Z-привода
и (или) наклон ГЗ в оправе в меридиональной плоскости в направлении увеличения
зенитного расстояния оси параболоида. Некоторый материал для установления
причины может дать полученный при проведении
работ отсчет по ДOC-Z
при фиксации трубы датчиком Холла на репере шестерни Z-привода, реализованной
квадрупольным магнитом. Этот отсчет Ерепер
= +00 о 00′ 02″,0. Отсюда, вероятной причиной
большого значения поправки ![]() может быть несанкционированное смещение (подвески червяка Z) червячной шестерни Z-привода
в сторону ГЗ.
может быть несанкционированное смещение (подвески червяка Z) червячной шестерни Z-привода
в сторону ГЗ.
Отчет-справку составил
сотрудник ООО «Фирма «ЮСТАС»
_________________ Вайнберг В.Я.