Алгоритм проверялся на прямых снимках с CCD-камеры RSS (телескоп SALT SAAO ЮАР). RMS невязок отождествления уменьшался почти в два раза.
Отчет ст. научного сотрудника лаборатории информатики
Шергина В.С. за 2017г.
8 декабря 2017 г.
Для обеспечения надежной работы БТА и Цейсс-1000 осуществлялось сопровождение МО их систем управления, видео-наблюдения, интерфейсов пользователей, а также консультационная помощь астрономам-наблюдателям, сотрудникам ЛОН и АСУ БТА. В частности, с началом реальных наблюдений в фокусе N1 введены поправки СКН для него, а в связи с тем что USNO снова закрыл доступ к данным IERS, скачивание файла поправок ser7.dat переведено на европейский сайт IERS в Германии.
По настоятельной просьбе зам.директора, принял участие в подготовке к эксплуатации нового привода поворотного стола БТА.
На основе лабораторного варианта системы управления БТА на ННП (разработанного в прошлом году для новых приводов SEW MOVIAXIS) был подготовлен вариант симуляции управления телескопом, но с реальным управлением поворотным столом (П2) по CAN-шине.
Приглашённый начальником комплекса БТА сторонний специалист произвёл на этой установке полную отладку привода П2 перед его установкой в СПФ БТА.
Продолжена работа по проекту создания каталога объектов на прямых снимках в архиве САО. На основе разработанных ранее программ, совместно с Т.Пляскиной, отлажен рабочий процесс помещения данных Scorpio и Цейсс-1000 в архив с привязкой координат и формированием списков обнаруженных объектов. Архивные данные также были перепривязаны с составлением списков объектов.
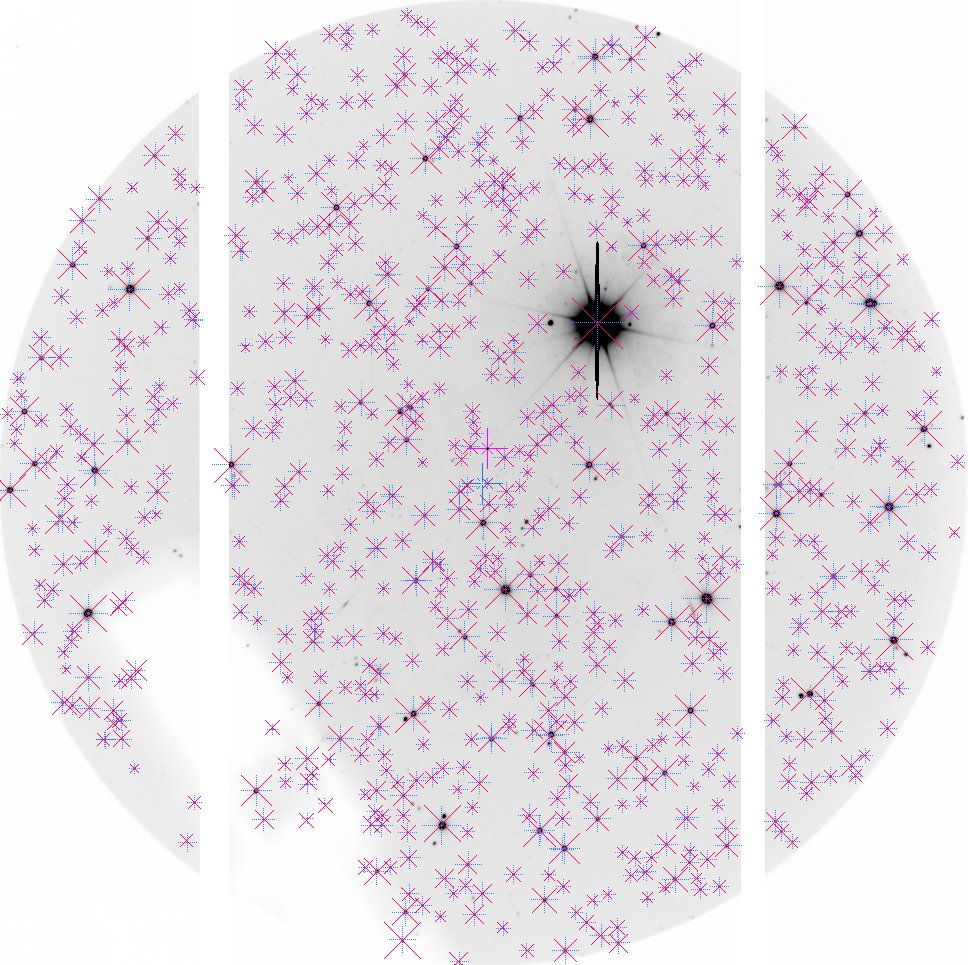
Для программ привязки прямых снимков разработан алгоритм аппроксимации дисторсии двумерными полиномами с переменным числом коэффициентов. Степень полиномов и число коэффициентов меняется автоматически в зависимости от числа отождествленных объектов. Степень меняется от 3 до 5. число коэффициентов — от 4 до 36. В WSC-шапку FITS-файла записываются SIP-коэффициенты для прямого и обратного преобразования в количестве до 72-х.
Алгоритм
проверялся на прямых снимках с CCD-камеры RSS (телескоп SALT SAAO
ЮАР). RMS невязок отождествления уменьшался почти в два раза.
После прошлогодней аварии В.Комаровым и Э.Емельяновым был разработан и установлен новый вариант цветной камеры AllSky на основе SBIG 340C. В связи с чем работа по презентации её изображений на Web-сайте БТА начата заново.
На первом этапе заново переписана программа bta_sbig.cgi. Теперь она обращается к сайту машины zarch по протоколу HTTP, получает само изображение, время его создания и рассчитывает звездное время для него. Затем производит разметку изображения положениями ярких звезд, созвездий и планет. Программа также может аннотировать архивные файлы по датам их создания.
Полученный результат не вполне устроил т.к. нормально выглядели изображения только днём и при луне, а звёздное небо получалось слабоконтрастным.

Поэтому, на втором этапе разработана программа sbig_fits2jpeg, которая скачивает с сайта машины zarch FITS-файл исходного изображения. Если это темновой кадр, то спасает его в файл. Если нет — считывает назад и вычитает темновой кадр из изображения. Затем пытается отфильтровать «горячие» пиксели (с учетом их цвета). После чего распаковывает маску Байера, производит статистический анализ изображения, выполняет коррекцию контрастности и цветности, формирует JPEG-файл и устанавливает его дату по DATE из FITS-шапки.

Полученное
изображение может аннотироваться программой bta_sbig.cgi.
Web-интерфейсы на сайте адаптированы для использования этих
возможностей.
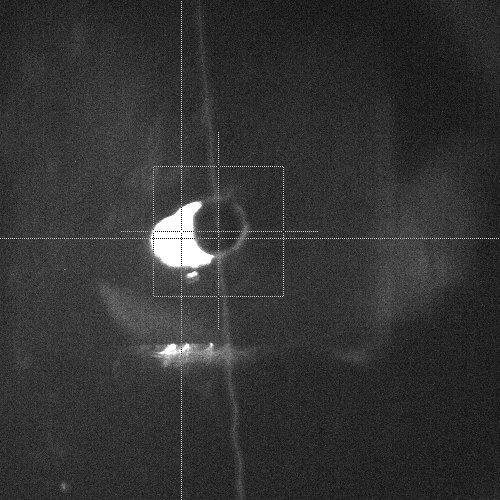
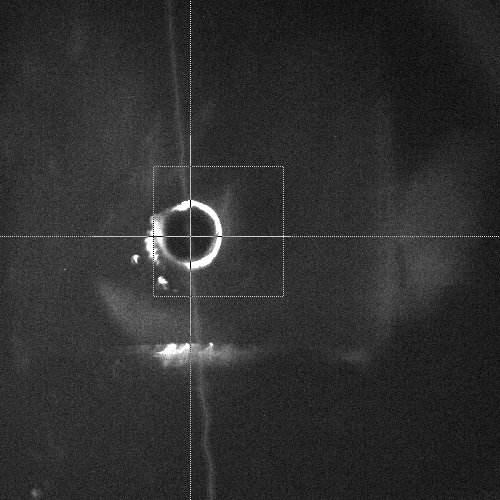
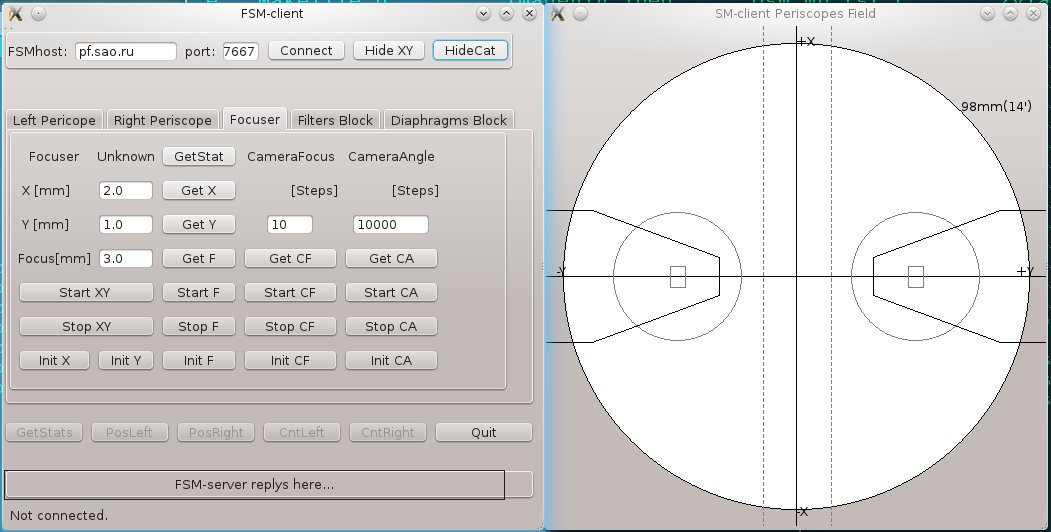
Продолжена работа в группе по созданию оптоволоконного спектрографа БТА. Выполнял работы по МО управления механикой предволоконной части спектрографа устанавливаемой в СПФ и МО узла быстрого гидирования концом волокна. Разработкой устройства занимаются А.Перков и Е.Иванов. Всего в нем должно быть более 30-ти двигателей подключённых к 7-ми контроллерам, 4 видеокамеры и 2 встроенных компьютера. В связи со сменой разработчика МО контроллеров, мою прошлогоднюю работу пришлось начать заново. Также работа осложняется отсутствием какой либо технической документации на разрабатываемую механику, что вызывает необходимость написания дополнительных программ для исследования физических характеристик устройств.
|
|
|